Différentes situations (mBot version 1)
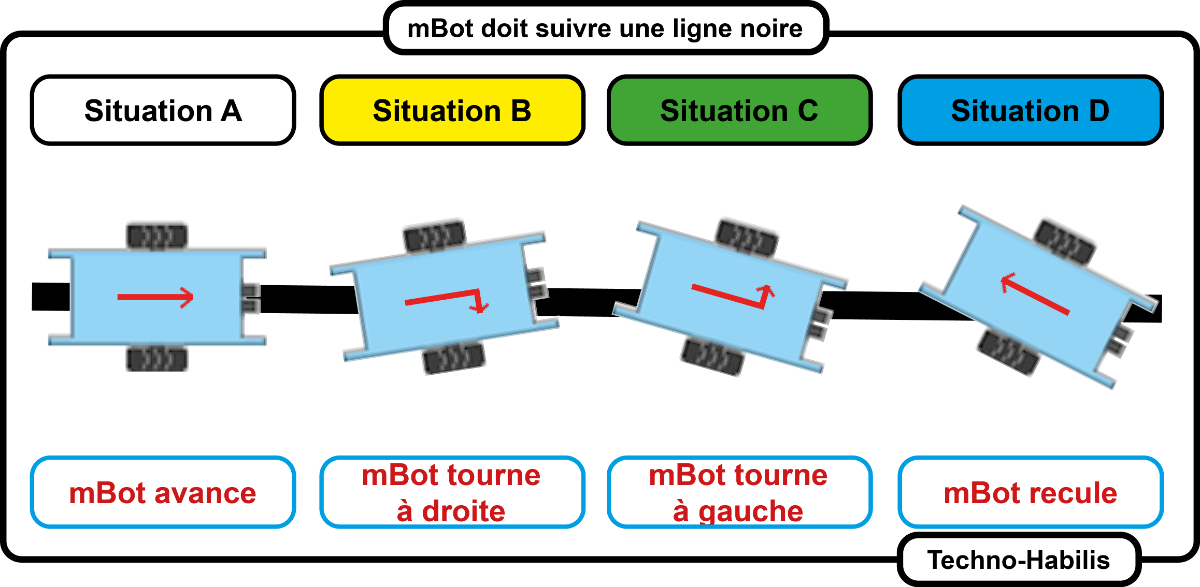
Situation A :
Les deux capteurs (IR) "Suiveur de ligne" de gauche et droite sont sur la ligne noire. Le robot mBot avance normalement.
Situation B :
Le capteur (IR) "Suiveur de ligne" de gauche est en dehors de la ligne noire et celui de droite est sur la ligne. le robot mBot va devoir tourner à droite pour retrouver la ligne noire et avancer comme dans la situation A.
Situation C :
Le capteur (IR) "Suiveur de ligne" de droite est en dehors de la ligne noire et celui de gauche est sur la ligne. le robot mBot va devoir tourner à gauche pour retrouver la ligne noire et avancer comme dans la situation A.
Situation D :
Les deux capteurs (IR) "Suiveur de ligne" gauche et droite sont en dehors de la ligne noire. Le robot mBot recule jusqu'à retrouver la ligne noire.


