mBot V1
mBot

Si la distance détectée est supérieure à 10 cm, le robot mBot avance, sinon il s'arrête.
Câblage Port 3 pour le capteur ultrasons du robot mbot.
Nb. : Si le robot mBot est connecté à mBlock, alors dans le menu "Evènements" il faudra choisir le bloc "Lorsque le mBot(mcore) démarre" au lieu de "Lorsque le bouton embarqué pressé".
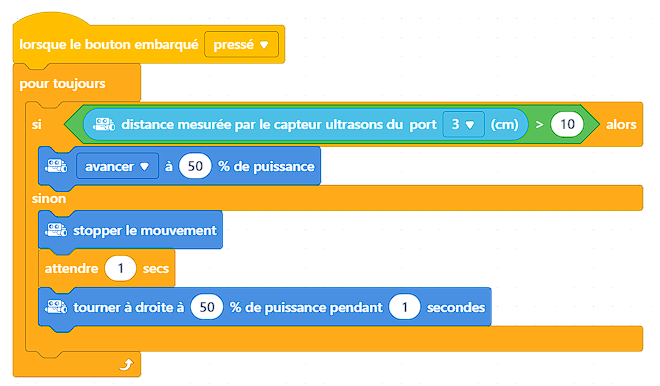
Si la distance détectée est inférieure à 10 cm, le robot mBot s'arrête, effectue un quart de tour et repart, sinon il avance.
Câblage Port 3 pour le capteur ultrasons du robot mbot.
Nb. : Si le robot mBot est connecté à mBlock, alors dans le menu "Evènements" il faudra choisir le bloc "Lorsque le mBot(mcore) démarre" au lieu de "Lorsque le bouton embarqué pressé".

Si la distance détectée est inférieure à 10 cm,
allumer la DEL gauche en orange,
allumer la DEL droite en rouge,
jouer une note "Do",
attendre 2 secondes,
tourner à droite, attendre 1 seconde.
Sinon éteindre les deux DEL(s), le robot mBot avance.
Câblage Port 3 pour le capteur ultrasons du robot mbot.
Nb. : Si le robot mBot est connecté à mBlock, alors dans le menu "Evènements" il faudra choisir le bloc "Lorsque le mBot(mcore) démarre" au lieu de "Lorsque le bouton embarqué pressé".
Régi par la licence Creative Commons: Licence d'attribution en partage identique 4.0