Introduction
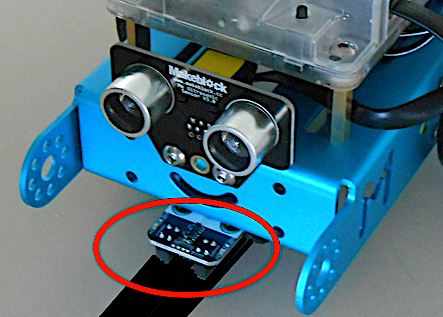
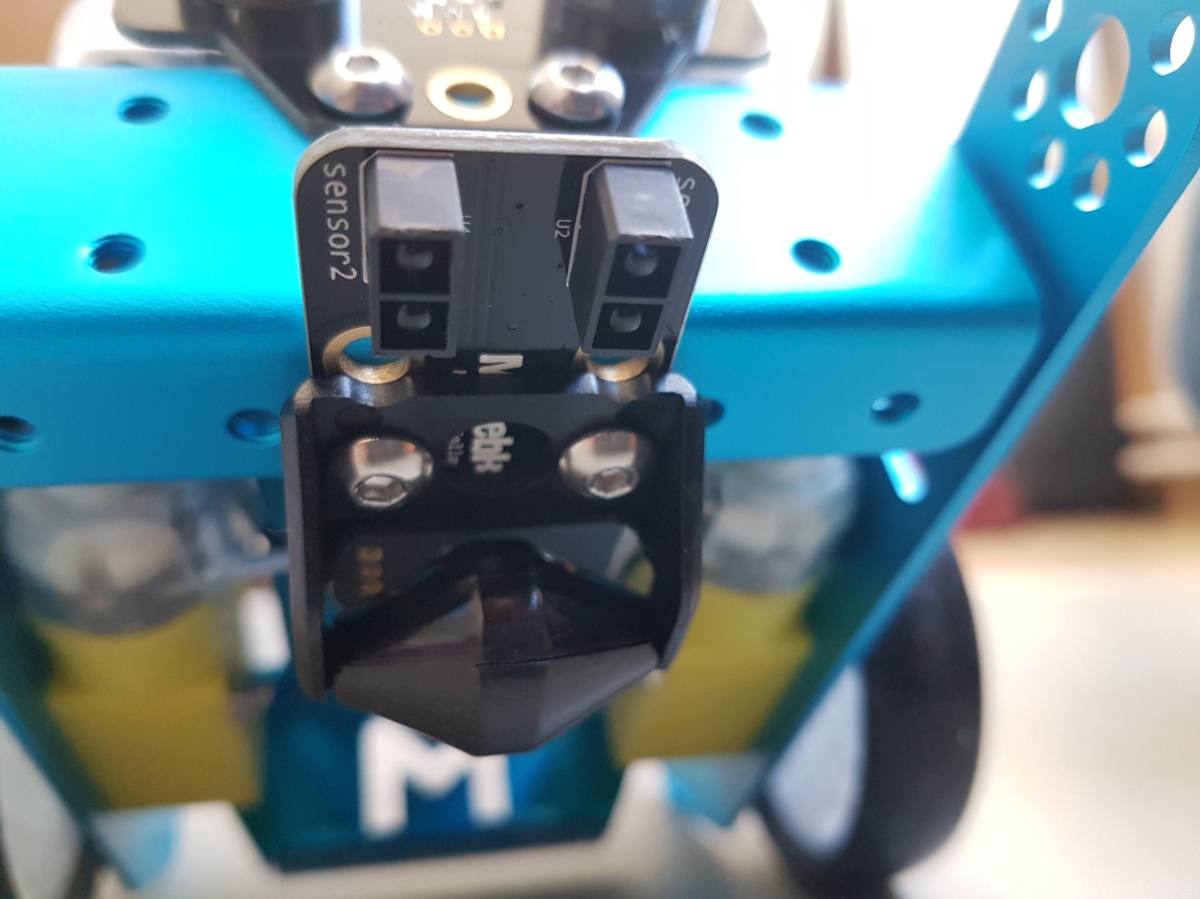
Le robot mBot dispose de deux phototransistors qui émettent chacun une onde (lumière).
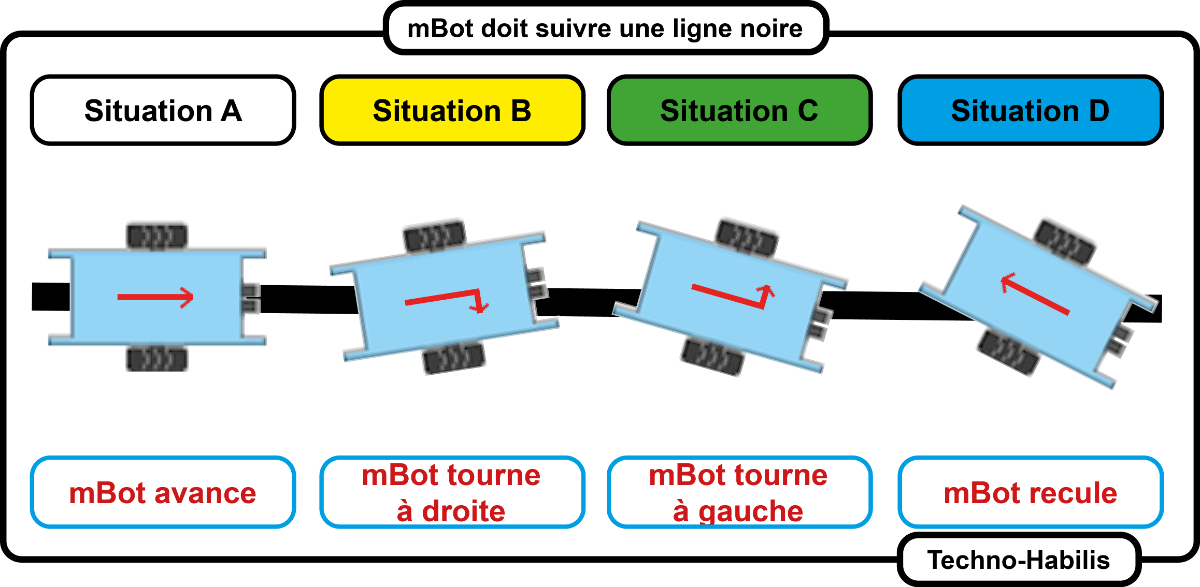
1er cas :
Le robot mBot circule sur une surface claire (blanche par exemple) alors la lumière est réfléchie et le phototransistor envoie un signal électrique.
2ème cas :
Le robot circule sur une surface noire alors la lumière n'est pas réfléchie et le phototransistor n'envoie aucun signal.